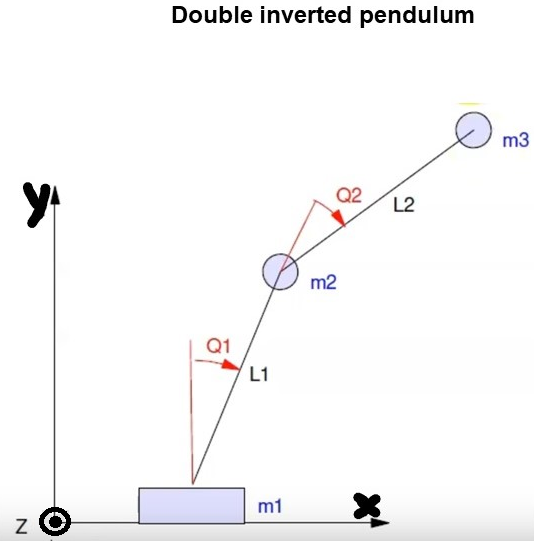
Stabilizing Double Inverted Pendulum in 2D
February 2022
Motivation: Silicon Synapse Lab, Northeastern University task
Details: We were a team of two who contributed to making this project under the guidance of our professor.
Tools and Resources:
- Simulink
Steps followed:
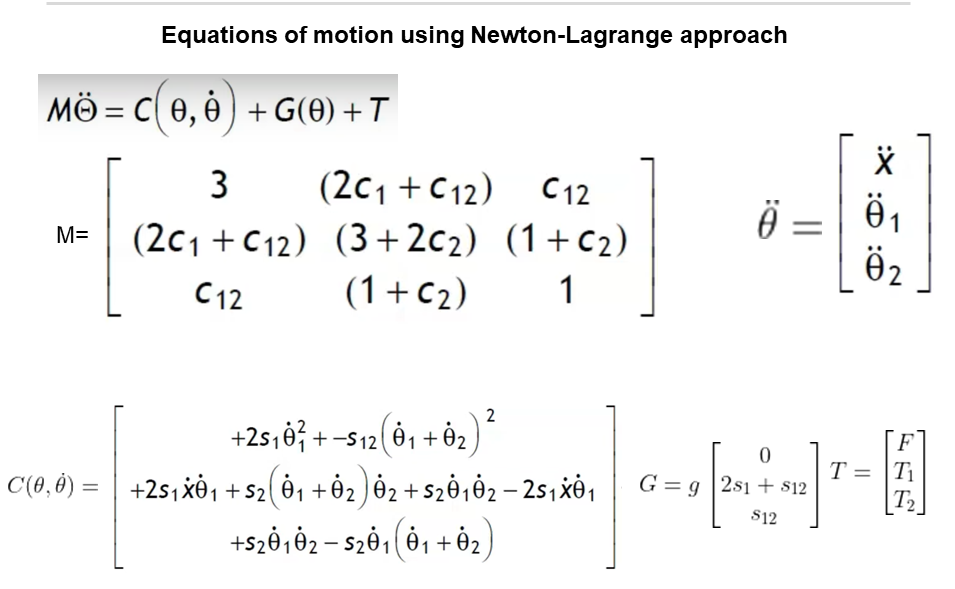
- Derive the dynamical equations using Lagrangian method (energy based)
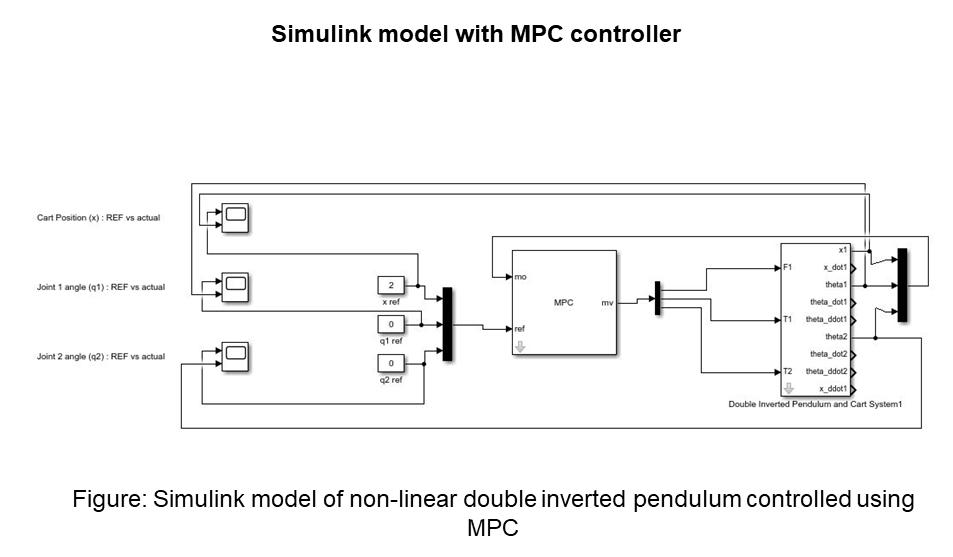
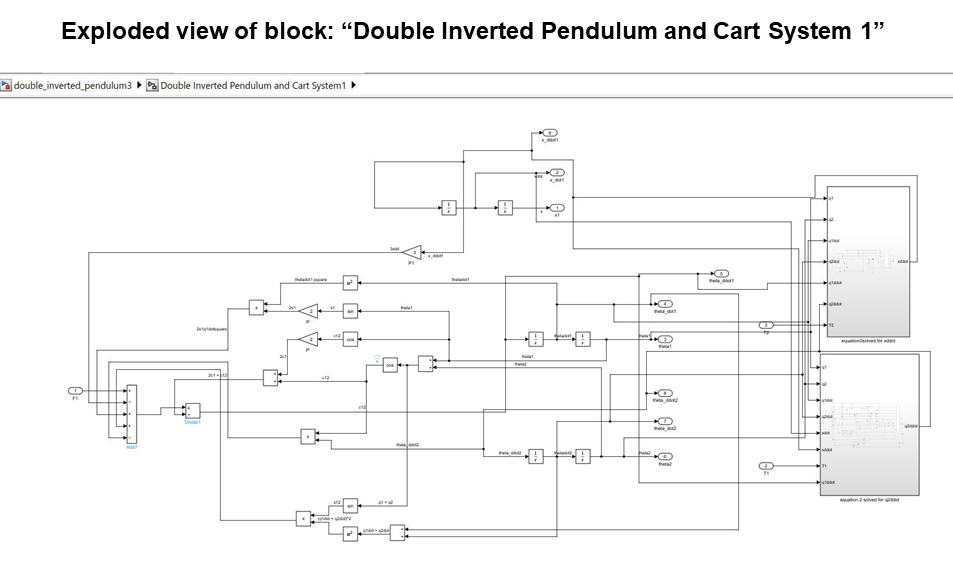
- Implement the equations in Simulink model
- Implement Model Predictive Controller (MPC) to stabilize the joint angles
- Tune MPC and check the output as shown by below images.
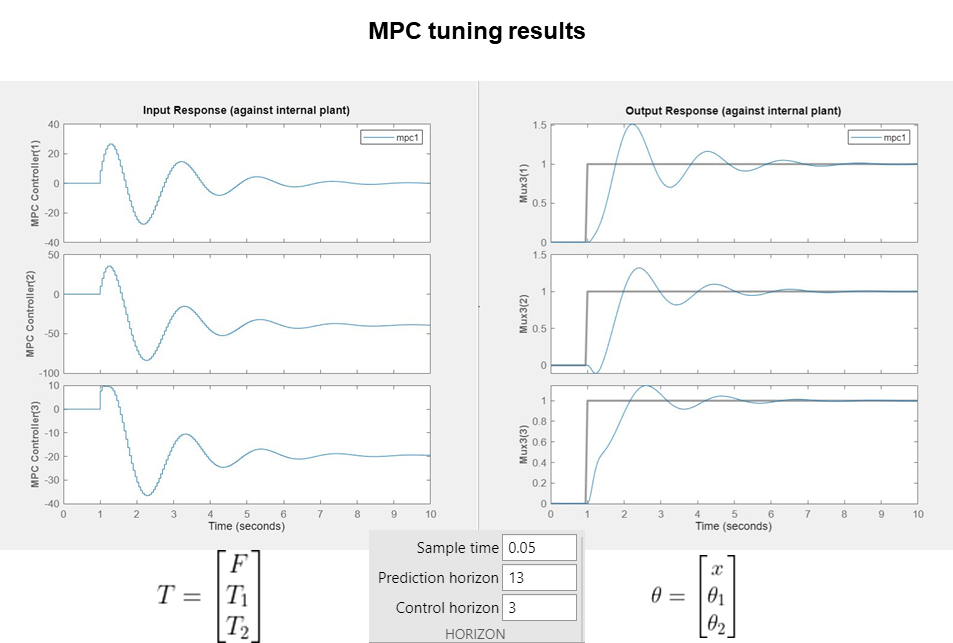
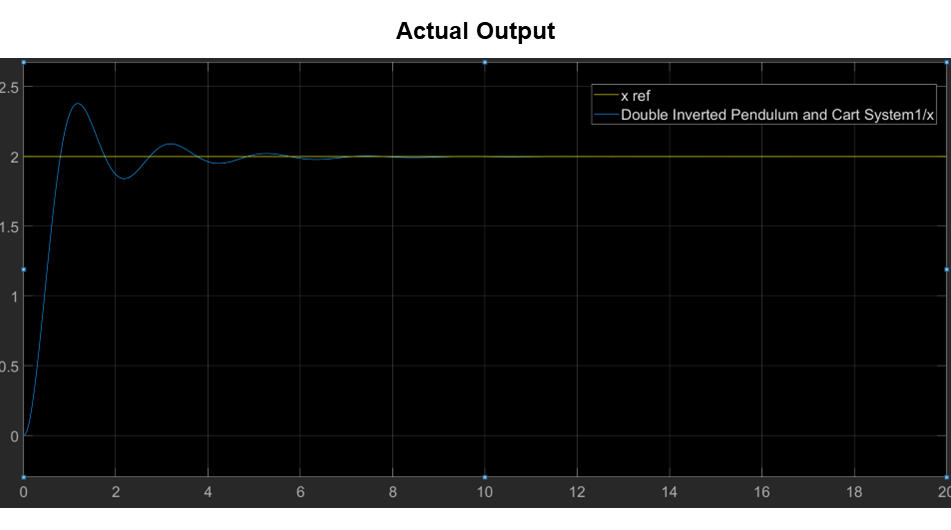
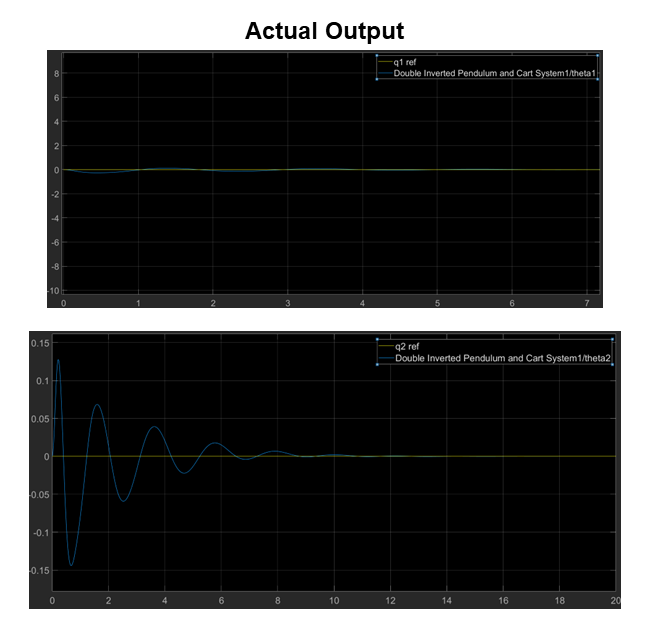
As can be seen from the above results, the pendulum stabilizes itself after ~ 9 seconds with the help of MPC controller. Hence, task objective is achieved.