Solving Inverse Kinematics for Double Inverted Pendulum in 3D
February 2022
Motivation: Silicon Synapse Lab, Northeastern University task
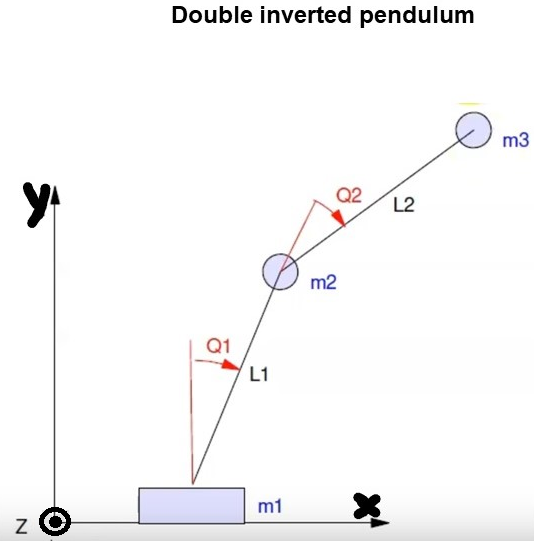
Objective:(B) Solve Inverse Kinematics (IK) of a double inverted pendulum in 3D for a desired Center of Mass (COM) trajectory
Details: We were a team of three who contributed to making this project under the guidance of our professor.
Tools and Resources:
- MATLAB
Steps followed:
- Brainstorm and assign co-ordinate frames to the 3D double inverted pendulum
- Calculate Forward Kinematics
- Choose a desired trajectory for COM
- Solve for Inverse Kinematics (IK) using a non-linear optimizer by implementing a cost function
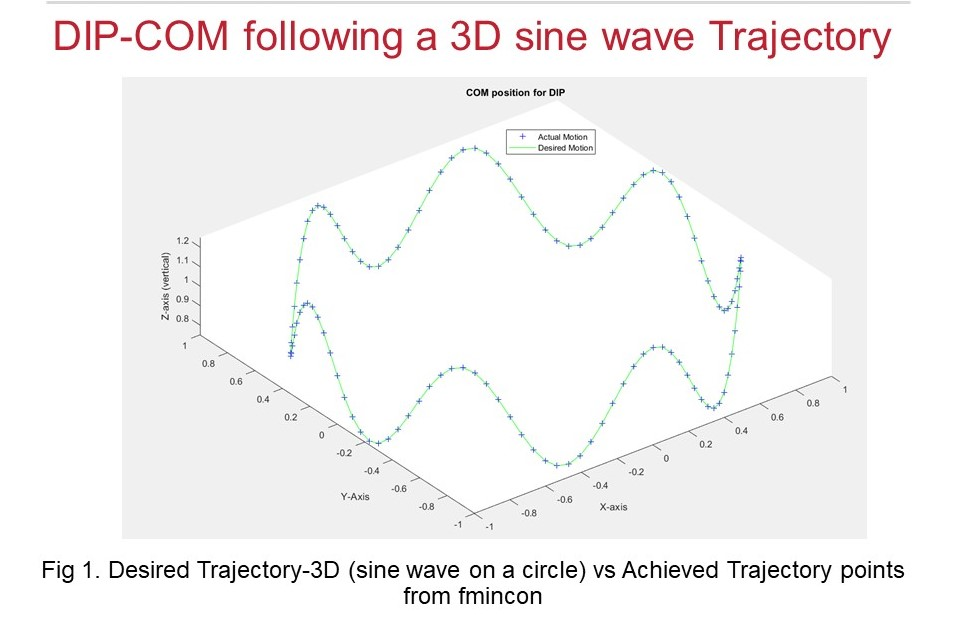
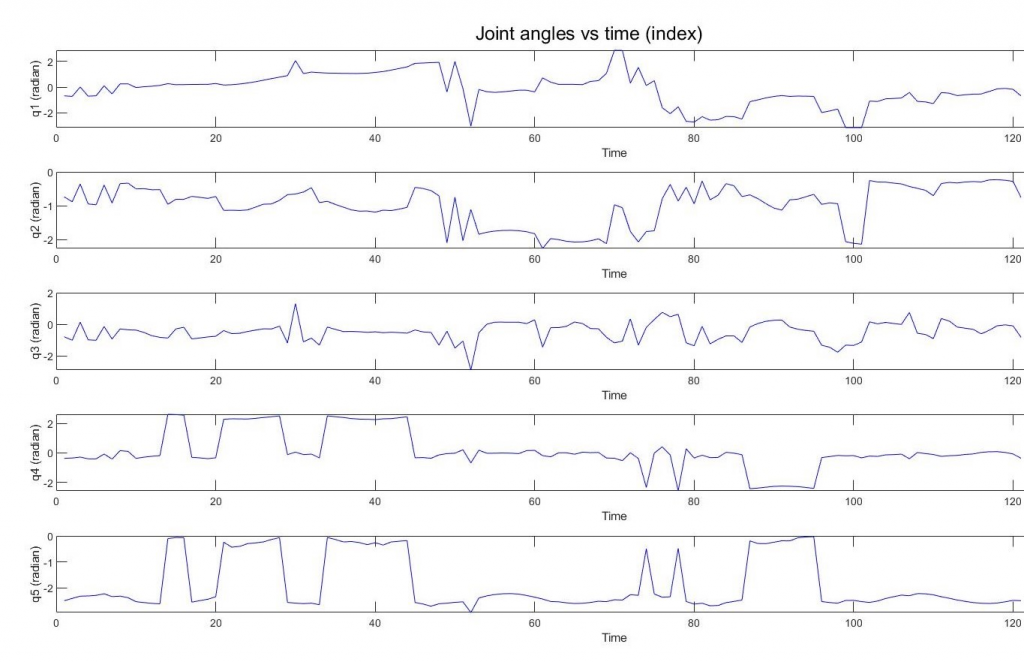
As can be seen from above output, joint angles are calculated using fmincon non-linear optimizer in MATLAB using quadratic error cost function. By following these joint angles, desired COM trajectory is achieved.