Dead Reckoning using IMU and comparison with GPS
February 2022
Motivation: Class assignment
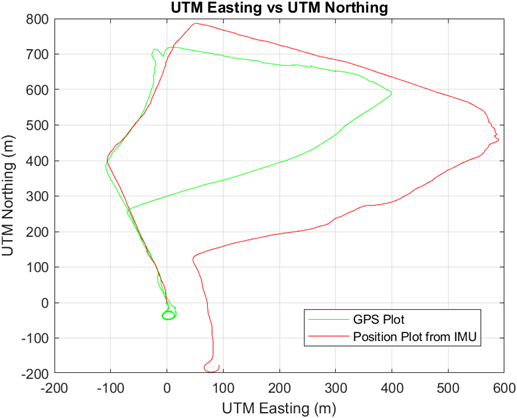
Objective: To capture moving dataset for GPS + IMU sensors in car, perform dead reckoning on it and compare with ground truth (i.e. GPS)
Details: We were a team of four who contributed to making this project under the guidance of our professor/ TAs.
Tools and Resources:
- VectorNav VN-100 IMU sensor mounted on car’s dashboard
- GlobalSat: BU-353-S4 USB GPS Receiver mounted on car’s rooftop
- MATLAB
Steps followed:
- Drive car in circles 3-4 times for magnetometer calibration and then drive around the city performing a loop closure
- Record the dataset in a rosbag file
- Perform Magnetomoter calibration (soft and hard iron correction)
- Calculate heading from magnetometer and compare with IMU heading
- Estimate velocity from both IMU and GPS and compare them
- Perform dead reckoning
Below animation is a summary of this project.